AIMS
AIMS AIMS-H Long Focus
AIMS-H Long Focus Farsightâą System
Farsightâą System Riegl VQ-1560i
Riegl VQ-1560i Riegl VQ-780II
Riegl VQ-780II UltraCam Eagle M3
UltraCam Eagle M3 Y-1 VTOL UAV
Y-1 VTOL UAV Aerial Acquisition
Aerial Acquisition UAV Acquisition
UAV Acquisition Satellite Acquisition
Satellite Acquisition Field Acquisition
Field Acquisition Integrated
Integrated LiDAR
LiDAR Orthophoto
Orthophoto DEM
DEM DTM/DSM
DTM/DSM 3D Mapping
3D Mapping Topographic
Topographic Infrared
Infrared Feature Extraction
Feature Extraction BIM
BIM Transportation
Transportation Water
Water power
power  Forestry
Forestry Agriculture
Agriculture Mines & Quarries
Mines & Quarries Heritage Buildings
Heritage Buildings About feiyan
About feiyan Recognition
Recognition Cases
Cases

search




What Is Lidar Point Cloud Data?
Apr 28, 2023
Lidar (laser detection and ranging) mainly uses lasers as the emission light source, and is an active remote sensing device that uses photoelectric detection technology. It is an optical remote sensing technology. Primarily used in airborne laser mapping applications, it is increasingly becoming a new cost-effective alternative to traditional measurement techniques such as photogrammetry.
LiDAR is composed of transmitting system, receiving system, information processing and other parts. It uses lasers to densely sample the Earth's surface to produce highly accurate x,y,z measurements. It can generate discrete multi-point cloud datasets that can be managed, displayed, analyzed and shared through ArcGIS.
After the lidar data acquisition measurement is completed, the point data will be post-processed into highly accurate georeferenced x,y,z coordinates by analyzing the time range of the laser, the scanning angle of the laser, GPS position and INS information.

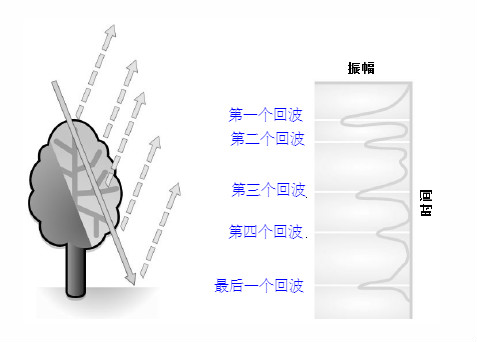
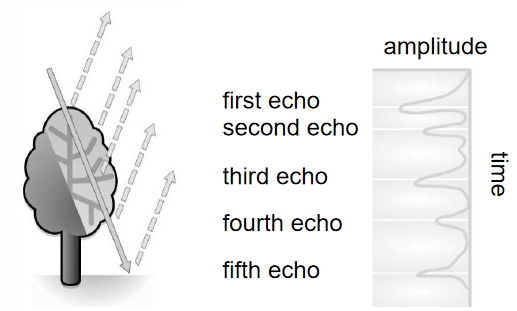
Laser pulses emitted from a LiDAR system reflect off the earth's surface and objects on it: vegetation, buildings, bridges, and more. An emitted laser pulse may return to the lidar sensor in the form of one or more echoes. Any emitted laser pulse that travels toward the ground and encounters multiple reflective surfaces is split into as many echoes as there are reflective surfaces.
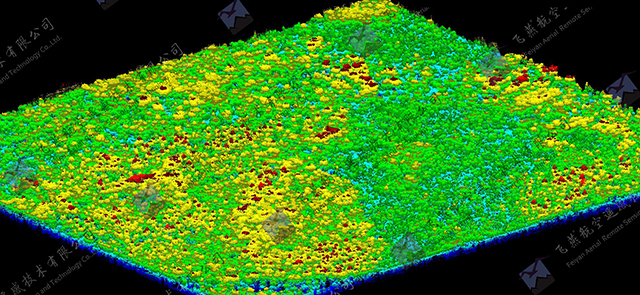
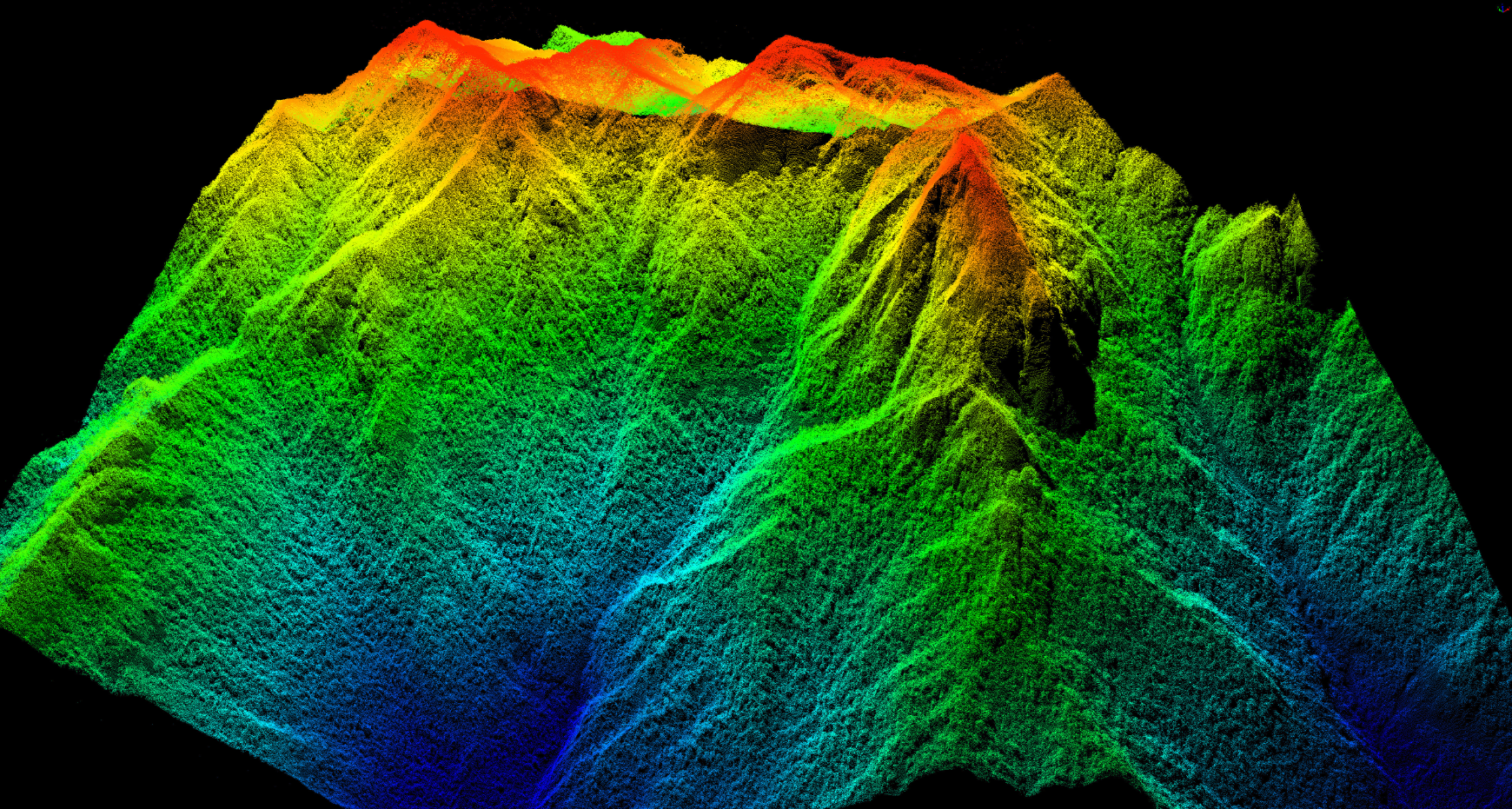
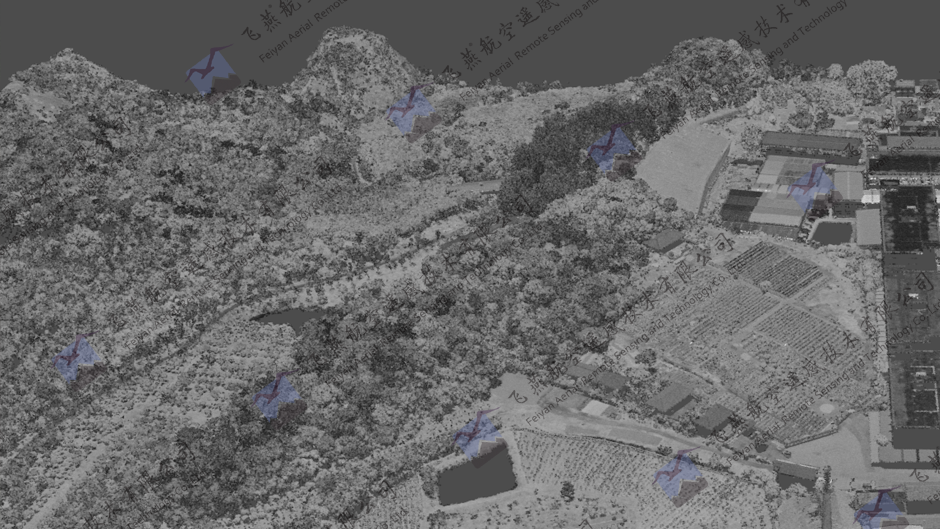
After post-processing, spatially organized lidar data is called point cloud data. The initial point cloud is a large collection of 3D elevation points, which include x-values, y-values, z-values, and other attributes such as GPS timestamps. After the initial lidar point cloud is post-processed, specific surface features encountered by the laser can be classified. The ground, buildings, forest canopy, highways, and any objects encountered by the laser beam during measurement constitute the laser point cloud data.


-
 Mar 18, 2022
Mar 18, 2022Feiyan Invested 20 Million For Airborne LiDAR Measurement
Feiyan invested 20 million to introduce airborne LiDAR measurement, which once again laid the foundation for the hardware strength of feiyan in the industry. More > -
Mar 22, 2022
What is LiDAR point cloud data?
LiDAR (laser detection and ranging) is an optical Remote sensing technology which mainly USES the laser as the emitting light source and adopts the active Remote sensing equipment of photoelectric detection technology. Primarily used in airborne laser mapping applications, it is increasingly becoming a cost-effective alternative to traditional measurement techniques such as photogrammetry. More > -
Mar 22, 2022
The Riegl Vq-1560i Airborne Laser Lidar Lived up to Expectations
The ninth China surveying and mapping geographic information technology equipment expo has been successfully concluded. More > -
Mar 22, 2022
Lidar Forest Survey, Incomparable Advantages
In recent years, LiDAR forest survey has attracted more and more people's attention. However, the hotter this new technology is, the more it needs to be understood from all aspects calmly. More > -
Mar 22, 2022
Lidar Is a Key Technology Involved in Terrain Mapping
This question cannot be asked like that. Aerial photography must be sunny, but the altitude angle of the sun must be considered. More > -
Mar 22, 2022
LiDAR and Hyperspectral Remote Sensing Data Fusion Realize Complementary Advantages
With the continuous development and progress of earth observation technology, and the continuous diversification of means for obtaining spatial information, the use of a single means of spatial data resources has been difficult to meet people's information needs. Lidar and hyperspectral Remote sensing, as two common Remote sensing methods, have different characteristics: Lidar can quickly, efficiently and accurately obtain three-dimensional spatial data of features, and hyperspectral images can well characterize the spectral information of features , Reflecting the characteristics of its features, materials, texture, etc. The fusion of these two kinds of data can achieve complementary advantages, maximize their respective characteristics, and achieve more accurate intelligent detection and identification of objects and higher-precision classification and extraction, which are widely used in forestry ecology, precision agriculture, environment Monitoring and other fields. More > -
Mar 22, 2022
What Are the Requirements for the Airborne Lidar Camera for the Acquisition of Lidar Point Cloud Data
In the effective altitude range, to ensure the lowest point cloud density, the laser radar maximum laser emission frequency To be higher. More > -
Mar 22, 2022
The Basics of LiDAR
LiDAR is an active Remote sensing system. An active system means that the system itself generates energy - in this case, light - to measure things on the ground. In a LiDAR system, light is emitted from a rapidly firing laser. You can imagine light quickly strobing from a laser light source. This light travels to the ground and reflects off of things like buildings and tree branches. The reflected light energy then returns to the LiDAR sensor where it is recorded. More > -
Mar 22, 2022
What Are the Different Uses of LiDAR Processing?
LiDAR (Light Detection and Ranging) technology and processing is used in a wide range of research and practical applications. With its ability to measure dimensions, distances, textures, and many other aspects of targeted subjects, LiDAR processing has become an increasingly important tool in geology, geography, surveying, agriculture, and forestry. Atmospheric sciences, archaeology, seismology, and geomatics also depend on data gathered using LIDAR processing for research, while physics and astronomy benefit from LiDAR's ability to create highly precise maps. More >