AIMS
AIMS AIMS-H Long Focus
AIMS-H Long Focus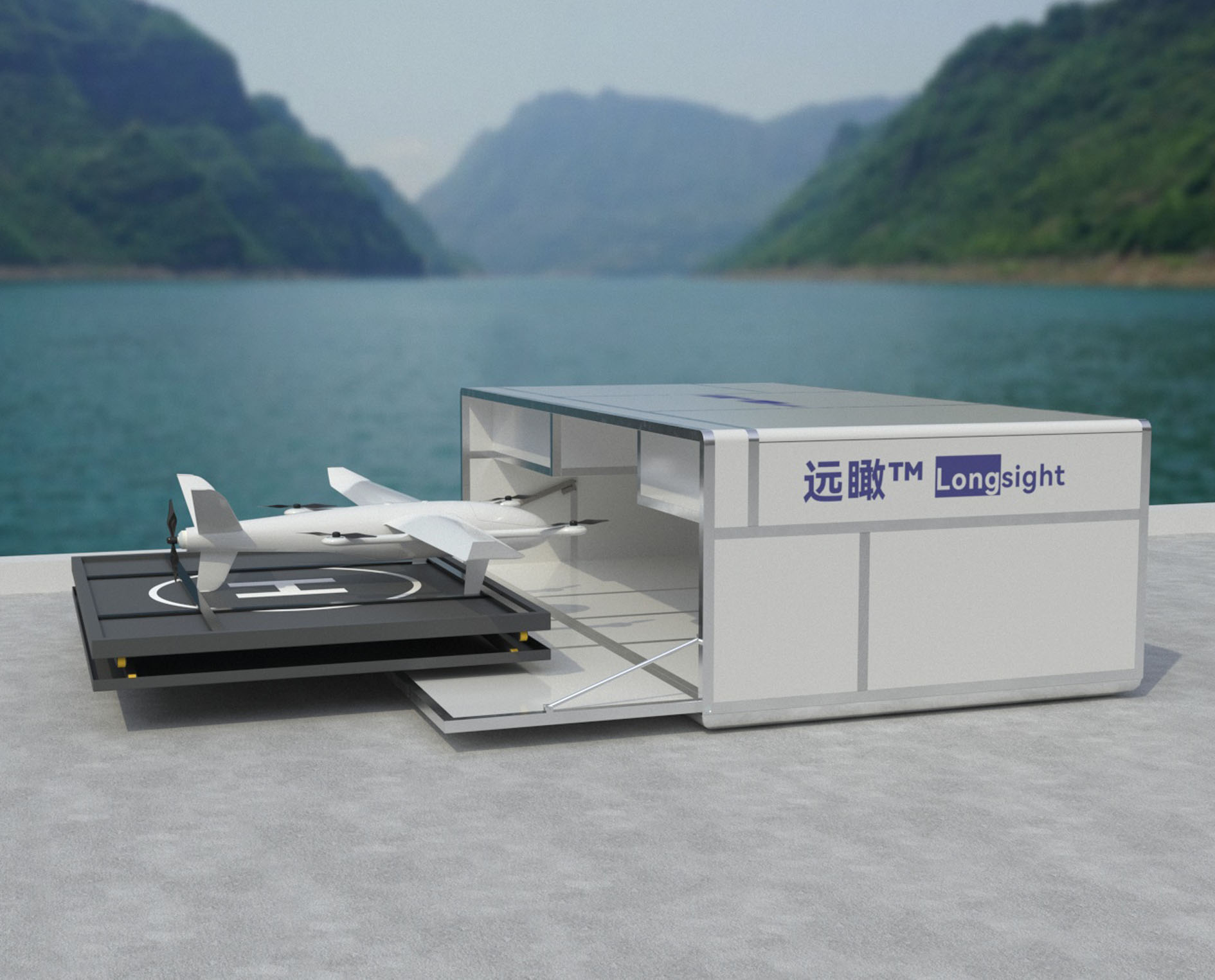 Farsightâą System
Farsightâą System Riegl VQ-1560i
Riegl VQ-1560i Riegl VQ-780II
Riegl VQ-780II UltraCam Eagle M3
UltraCam Eagle M3 Y-1 VTOL UAV
Y-1 VTOL UAV Aerial Acquisition
Aerial Acquisition UAV Acquisition
UAV Acquisition Satellite Acquisition
Satellite Acquisition Field Acquisition
Field Acquisition Integrated
Integrated LiDAR
LiDAR Orthophoto
Orthophoto DEM
DEM DTM/DSM
DTM/DSM 3D Mapping
3D Mapping Topographic
Topographic Infrared
Infrared Feature Extraction
Feature Extraction BIM
BIM Transportation
Transportation Water
Water power
power 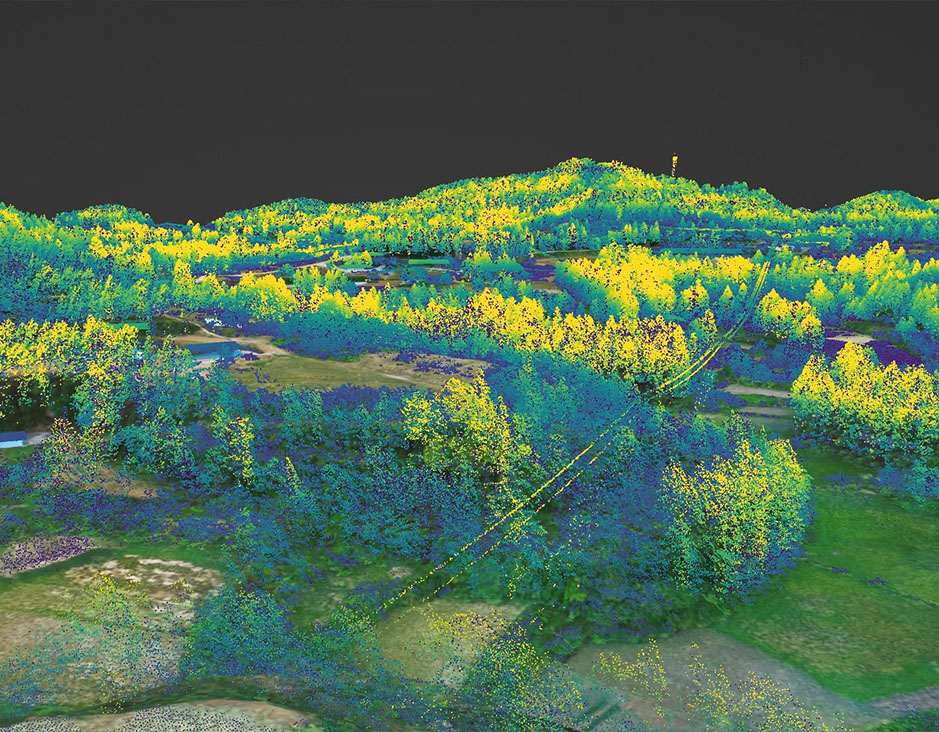 Forestry
Forestry Agriculture
Agriculture Mines & Quarries
Mines & Quarries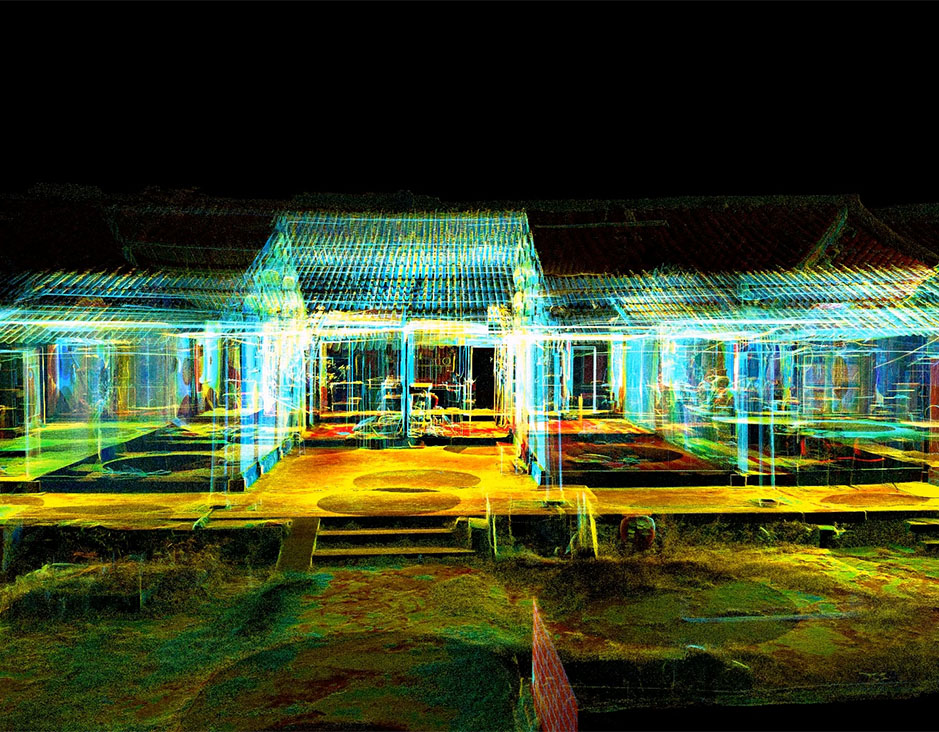 Heritage Buildings
Heritage Buildings About feiyan
About feiyan Recognition
Recognition Cases
Cases

search

Enter search content



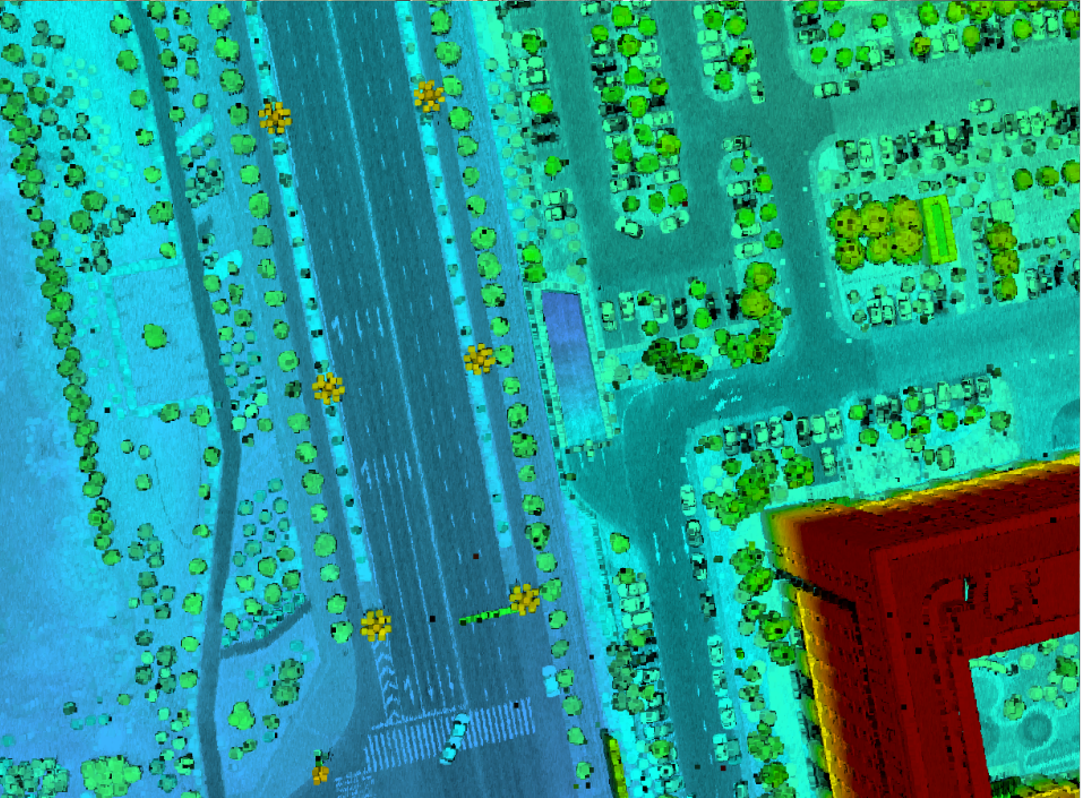
Problems and solutions encountered in laser point cloud data processing
Jun 29, 2023
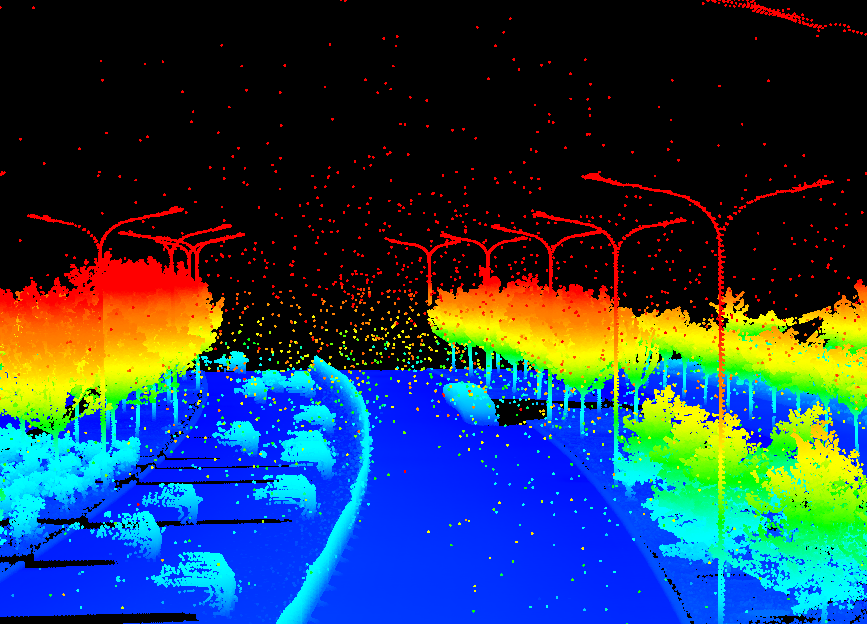
When using a 3D laser scanner to scan a target, it will be affected by the scanning equipment, surrounding environment, human disturbance, target characteristics, etc., making the point cloud data inevitably have some noise, resulting in the data not being able to correctly express the spatial position of the scanned object.
Noise points are mainly divided into three categories:
1. Noise generated when the reflection signal is weak due to the surface material of the object or the lighting environment;
2. Noise caused by people, vehicles or other objects passing between the scanning instrument and the object during the scanning process;
3. Systematic errors and random errors caused by the measurement equipment itself, such as scanner accuracy, camera resolution, etc.